mirror of
https://github.com/meshtastic/meshtastic.git
synced 2025-03-05 21:00:08 -08:00
Merge pull request #555 from Sn1PeR/Example-Serial-to-Additional-Microcontroller
Update serial.mdx
This commit is contained in:
commit
7702fe513a
|
|
@ -178,3 +178,51 @@ Default is to use RX GPIO 16 and TX GPIO 17.
|
|||
With [tio](https://github.com/tio/tio) – `tio -e -b 38400 -f none /dev/myserialport`
|
||||
7. Send a packet up to 237 bytes in length. This will get relayed over the mesh network.
|
||||
8. (Optional) Set `serial.echo` to `1` and any message you send out will be echoed back to your device.
|
||||
|
||||
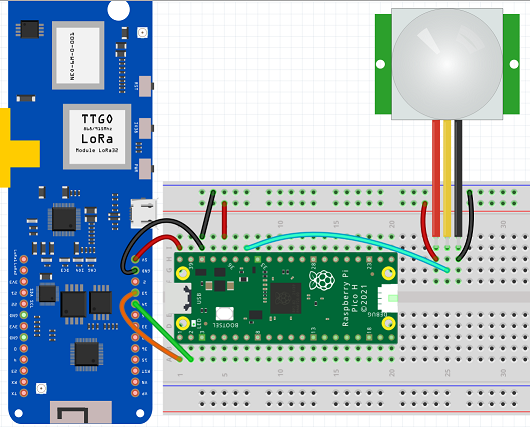
### T-Beam – Interfacing PIR Sensor With External Microcontroller:
|
||||
The following is an example of using a Raspberry Pi Pico connected to a PIR sensor to detect motion. When motion is detected, a message is sent via. serial to the T-Beam. The T-Beam transmits the message as text over the default channel by utilizing the serial module in TXTMSG mode.
|
||||
|
||||
#### BOM
|
||||
- Raspberry Pi Pico running [CircuitPython](https://learn.adafruit.com/getting-started-with-raspberry-pi-pico-circuitpython)
|
||||
- T-Beam V1.1 running Meshtastic
|
||||
- PIR Sensor ([Adafruit Breadboard Model](https://www.adafruit.com/product/4871))
|
||||
|
||||
#### Meshtastic Software Configuration:
|
||||
- Serial module enabled, mode: TXTMSG
|
||||
- GPIO Pins (For T-Beam) RX 13, TX 14
|
||||
- 38400 Baud
|
||||
|
||||
#### Wiring:
|
||||
|
||||
|
||||
|
||||
- TX pin 14 on the T-Beam to RX pin 2 on the Pico
|
||||
- RX pin 13 on the T-Beam to TX pin 1 on the Pico
|
||||
- PIR sensor Vcc and GND pins to Vcc/GND on breadboard respectively
|
||||
- PIR sensor trigger line to Pico GPIO28 (Pico pin 34)
|
||||
- GND pin on T-Beam to GND pin 38 on the Pico
|
||||
- GND pin 38 on the Pico to breadboard ground rail
|
||||
- 3V3 pin 36 on the Pico to the breadboard positive voltage rail
|
||||
- Optional, to power the Pico off of the T-Beam instead of USB:
|
||||
- Connect 5V pin on T-Beam to Vbus pin 40 on the Pico
|
||||
|
||||
#### Circuit Python Code
|
||||
```python
|
||||
import time
|
||||
import board
|
||||
import busio
|
||||
import digitalio
|
||||
|
||||
# Setup PIR sensor on GP28
|
||||
pir = digitalio.DigitalInOut(board.GP28)
|
||||
pir.direction = digitalio.Direction.INPUT
|
||||
|
||||
# Setup serial UART connection TX/RX on (GP0/GP1)
|
||||
uart = busio.UART(board.GP0, board.GP1, baudrate=38400, timeout=0)
|
||||
|
||||
while True:
|
||||
if(pir.value == True):
|
||||
uart.write(bytes("Motion Detected", "ascii"))
|
||||
time.sleep(30)
|
||||
time.sleep(0.5)
|
||||
```
|
||||
|
|
|
|||
Loading…
Reference in a new issue